
Les différents types de moteurs électroniques
-
3gms
- Découverte
Les moteurs sont des composants essentiels dans le domaine de la robotique, permettant aux robots de se déplacer, de manipuler des objets et d'accomplir une multitude de tâches. Il est important de comprendre les différents types de moteurs disponibles et leurs applications dans la conception et la construction de robots. Dans cet article, nous allons explorer les différents types de moteurs que l'on rencontre en robotique, leurs caractéristiques principales et leurs utilisations.

Les moteurs à courant continu, souvent abrégés en moteurs DC, sont parmi les moteurs les plus couramment utilisés en robotique. Ils fonctionnent en convertissant l'énergie électrique en mouvement mécanique rotatif. Les moteurs DC offrent une rotation bidirectionnelle et sont largement utilisés dans les robots mobiles pour la propulsion et la direction.

Les servomoteurs sont des moteurs à courant continu dotés d'un mécanisme de retour de position intégré, ce qui leur permet de se déplacer avec précision sur une plage d'angles spécifique. Les servomoteurs sont largement utilisés dans la robotique pour le contrôle de la position et de l'orientation.
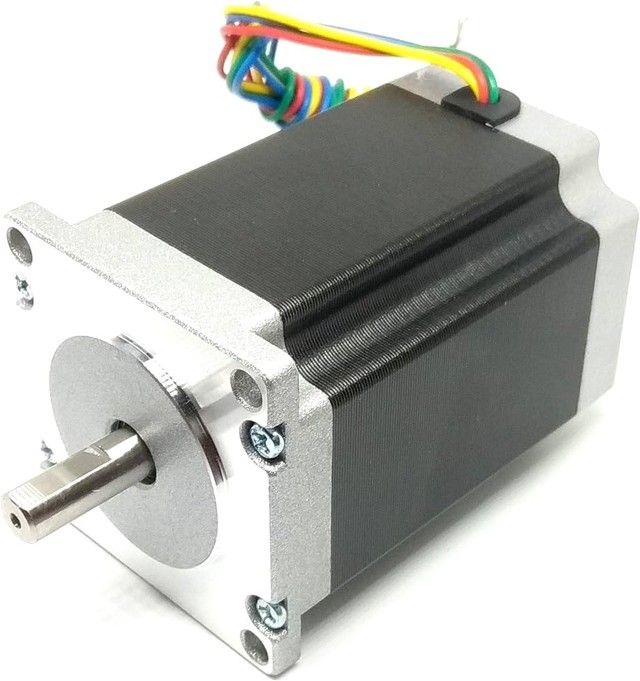
Les moteurs pas à pas (🇬🇧 stepper motor) sont des moteurs qui se déplacent par incréments discrets, ou pas, plutôt que de tourner en continu. Ils offrent un contrôle précis de la position et sont couramment utilisés dans les applications nécessitant un positionnement précis.
La robotique offre un large éventail de possibilités grâce à la diversité des moteurs disponibles. En tant que professeur de robotique, il est essentiel de comprendre les différents types de moteurs et leurs applications pour enseigner efficacement la conception, la construction et le contrôle des robots. Que vous construisiez un petit robot éducatif ou un système robotique complexe, le choix du moteur approprié est crucial pour le succès de votre projet. En explorant les différents types de moteurs en robotique, vous pouvez inspirer vos élèves à créer des robots innovants et passionnants.